常见问题
本文档汇集使用事件与回调可能出现的常见问题与解决方案
如何配置机器人能够接收消息和发送消息
开启机器人对话,需要进行事件配置,同时,需要添加机器人接收消息的事件和配置相应权限,机器人才能接收消息,如果需要机器人拥有发送消息的能力,还需要配置机器人发送消息的 API 能力。以上配置保存并发版后才能开启机器人对话的能力。
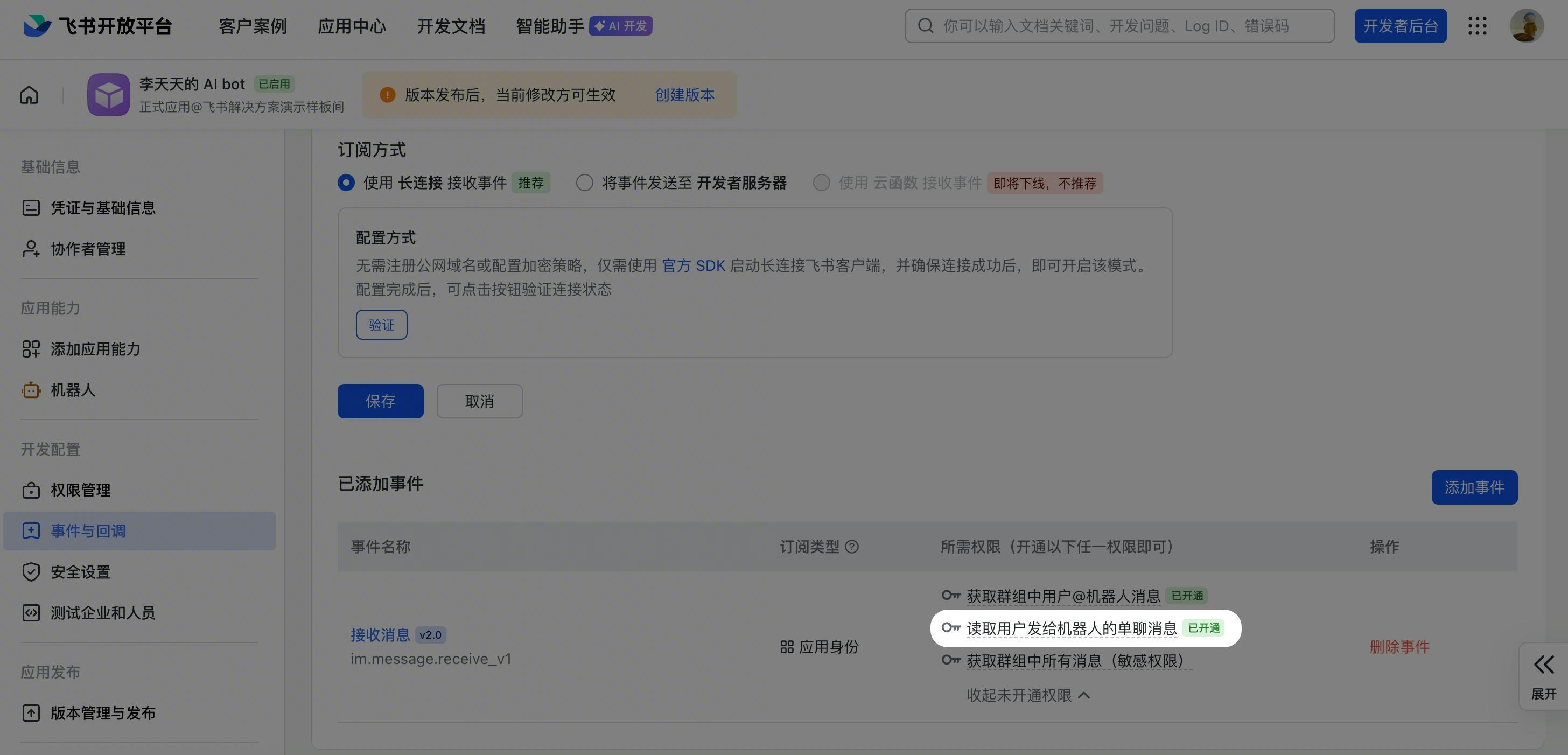
进行事件配置:订阅方式,可以选择“使用长连接接收事件”或“将事件发送至开发者服务器”,配置完成后,约1分钟,点击机器人对话页面,可给机器人发送消息
 注:若需要机器人能够接收到消息并处理,还需要添加「接收消息」的事件和配置相关权限
注:若需要机器人能够接收到消息并处理,还需要添加「接收消息」的事件和配置相关权限添加「接收消息」的事件
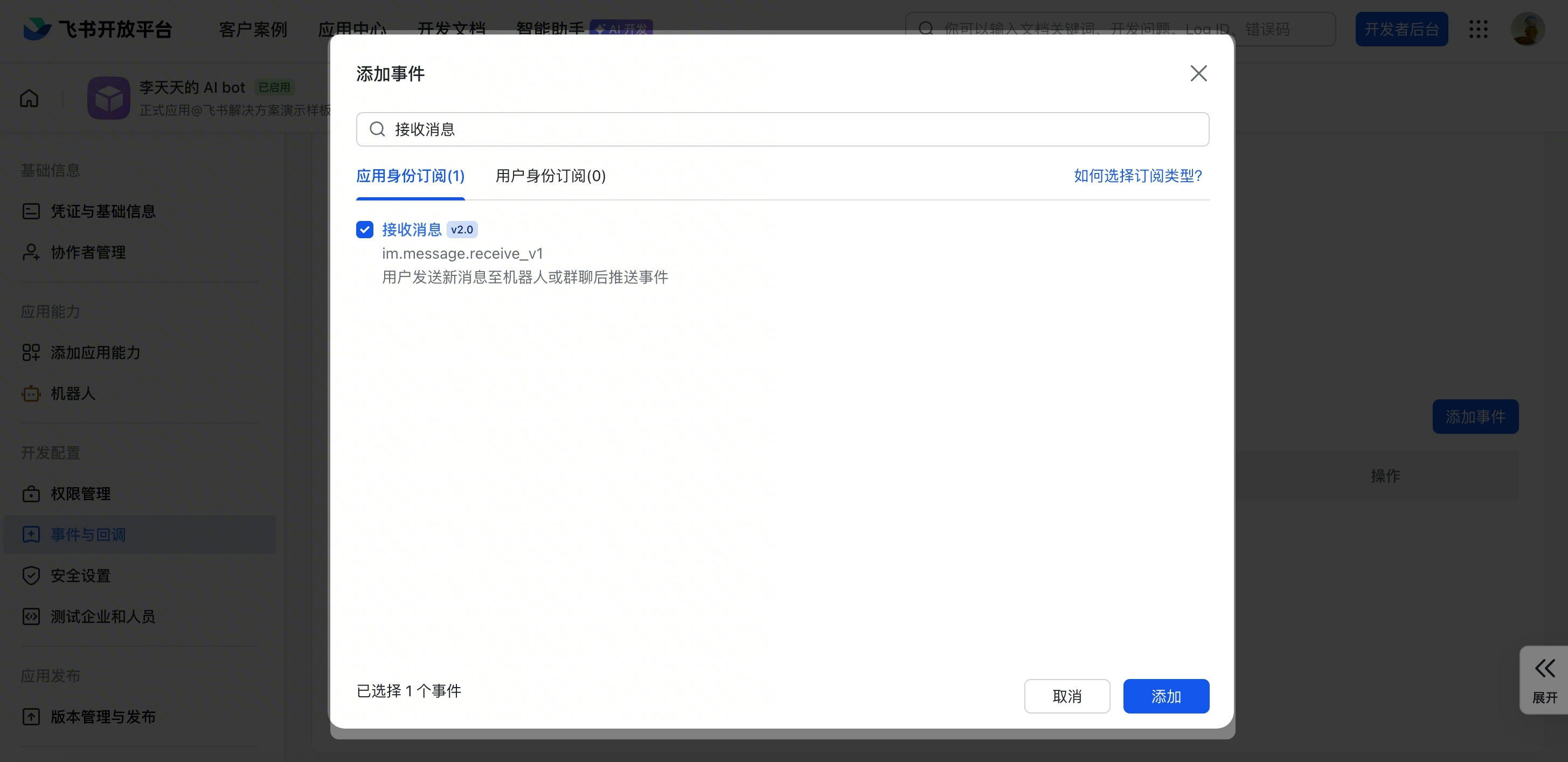
点击添加事件,添加应用身份订阅下的「接收消息」权限

点击权限名称后出现弹窗,在弹窗中可点击开通权限,当列表显示「已开通」,则机器人开通了对应权限

配置机器人发送消息的权限:配置机器人发送消息的 API 权限,机器人才能拥有发送消息的能力,发送消息的API为发送消息
在使用长连接时,如果部署了多个实例,会如何选择实例呢?
回答:
实例采用随机选择策略,长连接无环境、机房归属区分,所有 client 权重相同;例如 A 环境机器人发送的消息,回调节点也可能分配至 B 环境。
飞书长连接会出现长时间收不到 pong 回复?cmd 窗口敲回车后才接收到,同时还有报 ERROR。
回答:
- 网络差,检查一下是否有网络出流量限制。
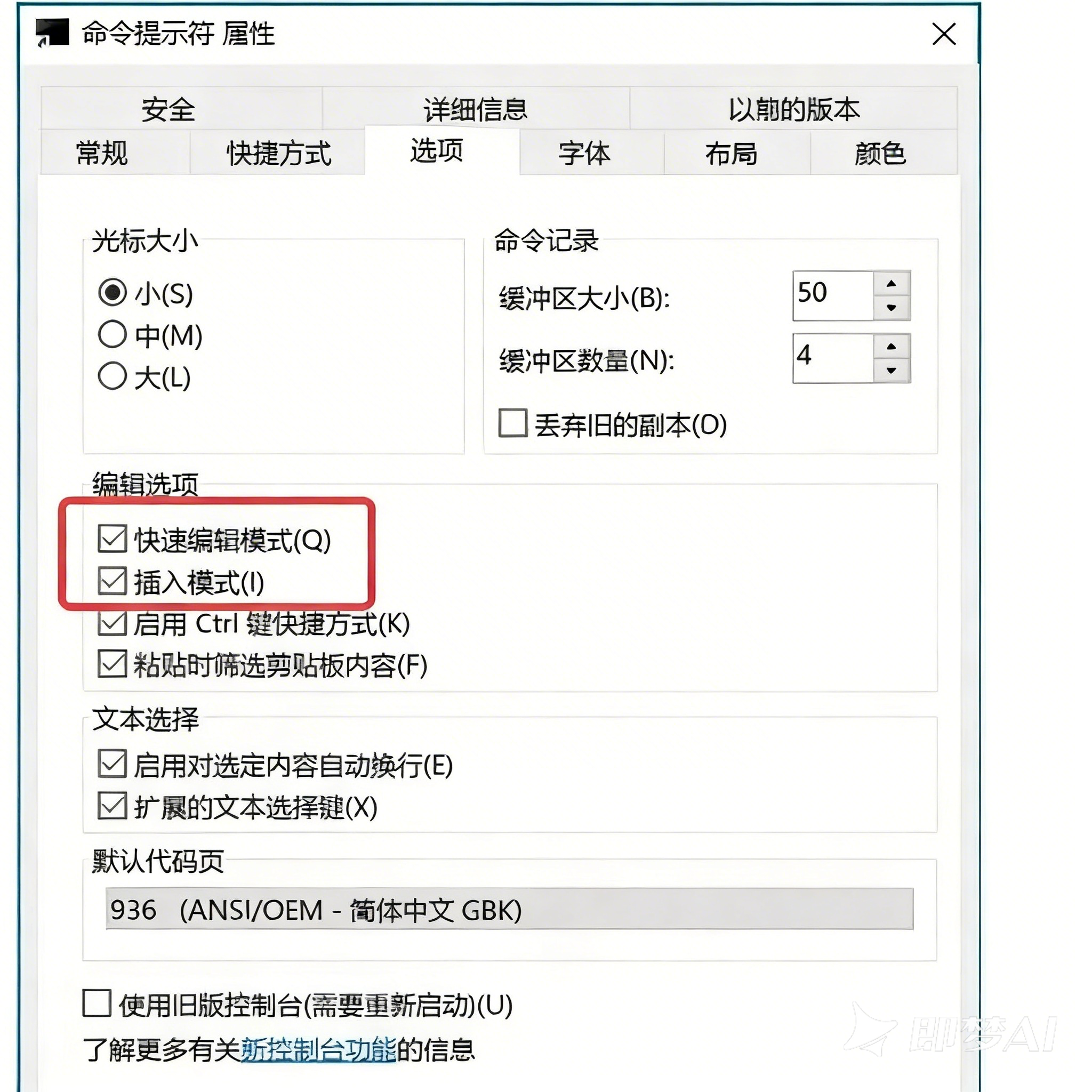
- 将CMD属性中的“快速编辑模式”关闭。
使用长连接时,出现 not found handler 错误
回答:
- 检查本地是否实现了对应的Handler
- 如果有多个Client,检查每个Client是否实现了全部的Handler
配置了长连接并且开通了对应的事件,但是在后台日志中没有对应的事件。
回答:
按照如下步骤检查:
- 切换至长连接模式后,应用是否完成发版;
- 若涉及回调,检查搭建工具中配置的回调类型是否为对象。
- 事件开通后需完成应用发版,请先核查应用是否已发版;若已订阅事件但事件日志无任何记录,说明订阅未成功,需联系技术支持排查。
长连接回调失败,报错“app not online”
回答:
若出现短时网络中断,SDK 会自动触发重连,网络恢复后即可正常使用;
配置了事件订阅,并且应用已经发版,但是在事件触发之后报 500 错误,原因是什么?
回答:
该问题通常因应用存在多个在线长连接实例所致:其中部分实例未实现对应监听事件的处理器(handler),进而触发 500 错误。
是否有方式能够查到应用建立了多少个长连接?
回答:
当前不支持查看应用已建立多少个长连接
使用事件订阅长连接方式,点击保存按钮的时候 提示:应用未建立长连接
回答:
订阅长连接前,需先确保已通过 SDK 在服务端 / 本地完成长连接的建立。
监听了指定的事件,但是会出现丢失事件的情况
回答:
该问题多因应用部署多个长连接实例,且部分实例未实现对应事件的 handler 所致。
长连接是否支持配置代理?
回答:
不支持。
卡片回调是否支持设置 LogID?
回答:
不支持
在使用长连接时,出现重复消费
回答:
消息重复消费通常由以下两种原因导致:
- 业务 handler 处理逻辑异常并返回错误,触发消息重推机制;
- 业务 handler 处理耗时超过 3s(事件要求 3s 内完成处理),触发消息重推,可通过异步启线程的方式解决。
卡片回调经常出现 200671 报错
回答: 该错误属于业务错误,找技术支持排查,不属于 SDK 的问题。
可能的原因:
- 开放平台 SDK 仅支持对象类型的卡片回传参数,不兼容字符串类型,该问题系用户在卡片模板中参数配置类型错误导致。
- 用户编写的服务端逻辑有问题